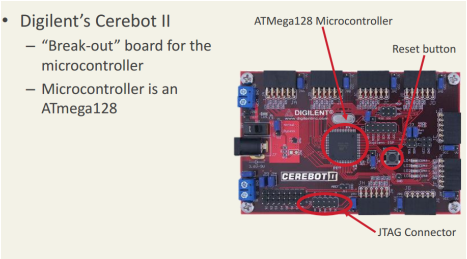
CprE 288 Final Project
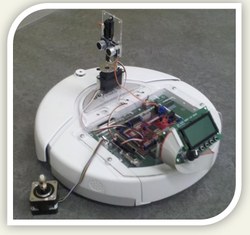
This project is the final project for CprE 288 Class - Embedded Systems. Teams of 4 students be formed. we has been asked to develop an interplanetary rover using the VORTEX platform. The VORTEX platform will be placed at a random position in the test field. The rover should traverse through several hazards to position itself within the retrieval zone.
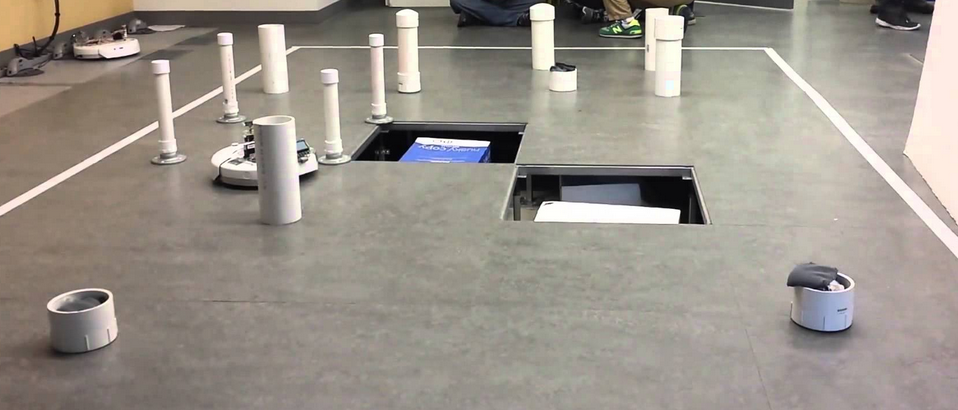
The terrain is hazardous, so the VORTEX must be capable of navigating the hazards of the terrain. The retrieval zone is marked by four pillars. The landing area will be marked by yellow tapes, so we will be able to recognize it from the information the VORTEX sends you. After the VORTEX reaches the marked goal, it should send signals to mission control indicating the rover is ready for retrieval.
Mission control needs to be able to process the information that the VORTEX platform sends to it. All information should be transmitted to the Mission control via Bluetooth.The Mission Control also needs to be capable of controlling the robot remotely.
Mission control needs to be able to process the information that the VORTEX platform sends to it. All information should be transmitted to the Mission control via Bluetooth.The Mission Control also needs to be capable of controlling the robot remotely.
Part I. Communication with the VORTEX
The interface should be able to show the current state of the following senseors:
• iRobot Bump Sensor (left, right)
• iRobot Cliff Sensors (left, front left, front right, right)
• iRobot Cliff Sensor Signals (left, front left, front right, right)
Part II. Traversing Treacherous Terrain for Retrieval
Within the testing environment, there are hazards that will make traversing the environment challenging. There are boulders (i.e. weighted containers), craters (i.e. removed floor tiles), and stalagmites (i.e. pieces of PVC pipe).
The Rover needs to respond quickly to the bump and cliff sensors. Because of this, the VORTEX cannot wait for a response from the Mission Control on how to respond. Therefore, our program should have some pre-programmed response to the bump sensor.
Part III. Positioning the Rover for Retrieval
Once the retrieval zone has been identified, the people at Mission Control should be able to position the robot within the retrieval zone. The rover should reach the marked goal, and then it will be fully located within the retrieval zone.
The interface should be able to show the current state of the following senseors:
• iRobot Bump Sensor (left, right)
• iRobot Cliff Sensors (left, front left, front right, right)
• iRobot Cliff Sensor Signals (left, front left, front right, right)
Part II. Traversing Treacherous Terrain for Retrieval
Within the testing environment, there are hazards that will make traversing the environment challenging. There are boulders (i.e. weighted containers), craters (i.e. removed floor tiles), and stalagmites (i.e. pieces of PVC pipe).
The Rover needs to respond quickly to the bump and cliff sensors. Because of this, the VORTEX cannot wait for a response from the Mission Control on how to respond. Therefore, our program should have some pre-programmed response to the bump sensor.
Part III. Positioning the Rover for Retrieval
Once the retrieval zone has been identified, the people at Mission Control should be able to position the robot within the retrieval zone. The rover should reach the marked goal, and then it will be fully located within the retrieval zone.
| final_project.c |
| lcd.c |
| |||
| util.c |